智能材料变形驱动是集材料、力学、生物学等多学科的交叉前沿研究热点。液晶弹性体(Liquid crystal elastomers,LCEs) 作为能够产生大的可逆驱动应变的智能柔性弹性体材料,通过设计含有各向异性刚性介晶单元的聚合物网络结构,在外界刺激下(光、热、电等) 使其达到相转变温度时,引发由液晶态(有序)向各向同性态(无序)转变的链段运动,进而表现为宏观结构程序化变形。液晶弹性体材料类似于自然界生物体在多种外界刺激下自我调节的特性,在开发智能仿生设备和构建软体机器人系统中拥有巨大的应用前景。
受费曼工作(The Feynman Lectures on Physics)启发,近日,芭蕉传媒视频免费观看徐琳教授、丁建宁教授与美国科罗拉多大学博尔德分校Franck Vernerey教授合作报告了一种基于液晶弹性体辐条的非对称收缩来旋转运动的Feynman车轮型软体机器人,创新性地实现了无需控制电源周期性开关即可进行持续自主运动的电驱动液晶弹性体软体机器人。这一设计理念有望启发其他软体机器人智能材料与智能结构的多元集成,代表着自主运动的软体机器人设计向前迈进了可喜的一步。该研究以“Programming motion into materials using electricity-driven liquid crystal elastomer actuators”为题发表在国际著名期刊Soft Robotics上。芭蕉传媒视频免费观看为该论文的第一单位,研究生朱陈和Samuel Lamont为共同一作。该工作得到了国家自然科学基金、江苏省自然科学基金和机械系统与振动全国重点实验室开放基金等项目的支持。

图1. 液晶弹性体驱动机理与Feynman软体机器人结构
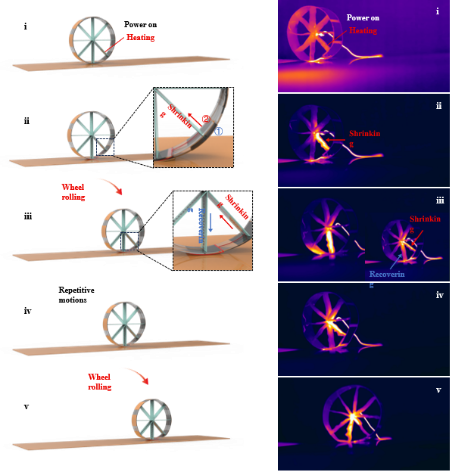
图2. Feynman车轮软体机器人持续运动机制

Feynman车轮软体机器人运动展示
文章链接:
https://doi.org/10.1089/soro.2023.0063